производная#
- scipy.differentiate.производная(f, x, *, args=(), допуски=None, maxiter=10, порядок=8, initial_step=0.5, step_factor=2.0, step_direction=0, preserve_shape=False, callback=None)[источник]#
Вычислить производную поэлементной вещественной скалярной функции численно.
Для каждого элемента вывода f,
derivativeаппроксимирует первую производную от f в соответствующем элементе x используя дифференцирование методом конечных разностей.Эта функция работает поэлементно, когда x, step_direction, и args содержат (транслируемые) массивы.
- Параметры:
- fcallable
Функция, производная которой требуется. Сигнатура должна быть:
f(xi: ndarray, *argsi) -> ndarray
где каждый элемент
xiявляется конечным вещественным числом иargsiявляется кортежем, который может содержать произвольное количество массивов, совместимых по размерности сxi. f должна быть поэлементной функцией: каждый скалярный элементf(xi)[j]должно равнятьсяf(xi[j])для допустимых индексовj. Он не должен изменять массивxiили массивы вargsi.- xfloat array_like
Абсциссы, в которых вычисляется производная. Должны быть совместимы с args и step_direction.
- argsкортеж из array_like, необязательно
Дополнительные позиционные аргументы в виде массивов для передачи в f. Массивы должны быть совместимы для трансляции друг с другом и массивами init. Если вызываемый объект, для которого требуется найти корень, требует аргументов, которые не транслируются с x, оберните этот вызываемый объект с f такой, что f принимает только x и поддерживающие вещание
*args.- допускисловарь чисел с плавающей точкой, опционально
Абсолютная и относительная погрешности. Допустимые ключи словаря:
atol- абсолютный допуск на производнуюrtol- относительный допуск на производную
Итерация остановится, когда
res.error < atol + rtol * abs(res.df). По умолчанию atol является наименьшим нормальным числом соответствующего типа данных, и по умолчанию rtol является квадратным корнем точности соответствующего типа данных.- порядокint, по умолчанию: 8
(Положительный целый) порядок формулы конечных разностей, которая будет использоваться. Нечетные целые числа будут округлены до следующего четного целого числа.
- initial_stepfloat array_like, по умолчанию: 0.5
(Абсолютный) начальный размер шага для аппроксимации производной конечными разностями.
- step_factorfloat, по умолчанию: 2.0
Коэффициент, на который умножается размер шага уменьшенный на каждой итерации; т.е. размер шага на итерации 1 равен
initial_step/step_factor. Еслиstep_factor < 1, последующие шаги будут больше начального шага; это может быть полезно, если шаги меньше некоторого порога нежелательны (например, из-за ошибки вычитательной отмены).- maxiterint, по умолчанию: 10
Максимальное количество итераций алгоритма для выполнения. См. Примечания.
- step_directionцелочисленный array_like
Массив, представляющий направление шагов конечных разностей (для использования, когда x находится близко к границе области определения функции.) Должно быть совместимо с x и все args. Где 0 (по умолчанию), используются центральные разности; где отрицательное (например, -1), шаги неположительные; и где положительное (например, 1), все шаги неотрицательные.
- preserve_shapebool, по умолчанию: False
В следующем, "аргументы f” относится к массиву
xiи любые массивы внутриargsi. Пустьshapeбудет трансляционной формой x и все элементы args (что концептуально отличается отxi` and ``argsiпередано в f).Когда
preserve_shape=False(по умолчанию), f должен принимать аргументы любой совместимые формы для вещания.Когда
preserve_shape=True, f должен принимать аргументы формыshapeилиshape + (n,), где(n,)это количество абсцисс, в которых вычисляется функция.
В любом случае, для каждого скалярного элемента
xi[j]внутриxi, массив, возвращаемый f должен включать скалярf(xi[j])по тому же индексу. Следовательно, форма вывода всегда совпадает с формой вводаxi.См. примеры.
- callbackвызываемый объект, необязательный
Необязательная пользовательская функция, вызываемая перед первой итерацией и после каждой итерации. Вызывается как
callback(res), гдеresявляется_RichResultаналогично тому, что возвращаетсяderivative(но содержащий текущие значения всех переменных на данной итерации). Если callback вызываетStopIteration, алгоритм немедленно завершится иderivativeвернёт результат. callback не должен изменять res или его атрибуты.
- Возвращает:
- res_RichResult
Объект, похожий на экземпляр
scipy.optimize.OptimizeResultсо следующими атрибутами. Описания написаны так, как будто значения будут скалярами; однако, если f возвращает массив, выходные данные будут массивами той же формы.- successлогический массив
Trueгде алгоритм успешно завершился (статус0);Falseв противном случае.- statusцелочисленный массив
Целое число, представляющее статус завершения алгоритма.
0: Алгоритм сошелся к заданным допускам.-1: Оценка ошибки увеличилась, поэтому итерация была прекращена.-2: Достигнуто максимальное количество итераций.-3: Встречено неконечное значение.-4: Итерация была завершена callback.1: Алгоритм работает нормально (в callback только).
- dfмассив float
Производная от f в x, если алгоритм завершился успешно.
- ошибкамассив float
Оценка ошибки: величина разницы между текущей оценкой производной и оценкой в предыдущей итерации.
- nitцелочисленный массив
Количество выполненных итераций алгоритма.
- nfevцелочисленный массив
Количество точек, в которых f было вычислено.
- xмассив float
Значение, при котором производная f была оценена (после трансляции с args и step_direction).
Примечания
Реализация была вдохновлена jacobi [1], numdifftools [2], и DERIVEST [3], но реализация следует теории рядов Тейлора более прямолинейно (и, возможно, наивно). На первой итерации производная оценивается с использованием формулы конечных разностей порядка порядок с максимальным размером шага initial_step. На каждой последующей итерации максимальный размер шага уменьшается на step_factor, и производная оценивается снова до достижения условия завершения. Оценка ошибки - это величина разницы между текущим приближением производной и приближением предыдущей итерации.
Шаблоны формул конечных разностей разработаны так, что абсциссы «вложены»: после f вычисляется в
order + 1точки в первой итерации, f вычисляется только в двух новых точках в каждой последующей итерации;order - 1ранее вычисленные значения функции, требуемые формулой конечных разностей, повторно используются, и два значения функции (вычисления в точках, наиболее удалённых от x) не используются.Шаги абсолютны. Когда размер шага мал относительно величины x, точность теряется; например, если x является
1e20, размер начального шага по умолчанию0.5не может быть разрешена. Соответственно, рассмотрите использование больших начальных размеров шага для больших величин x.Стандартные допуски сложно удовлетворить в точках, где истинная производная равна нулю. Если производная может быть точно нулевой, рассмотрите указание абсолютного допуска (например,
atol=1e-12) для улучшения сходимости.Ссылки
[1]Ханс Дембински (@HDembinski). jacobi. HDembinski/jacobi
[2]Per A. Brodtkorb и John D’Errico. numdifftools. https://numdifftools.readthedocs.io/en/latest/
[3]Джон Д’Эррико. DERIVEST: Адаптивная робастная численная дифференциация. https://www.mathworks.com/matlabcentral/fileexchange/13490-adaptive-robust-numerical-differentiation
[4]Численное дифференцирование. Википедия. https://en.wikipedia.org/wiki/Numerical_differentiation
Примеры
Вычислить производную
np.expв нескольких точкахx.>>> import numpy as np >>> from scipy.differentiate import derivative >>> f = np.exp >>> df = np.exp # true derivative >>> x = np.linspace(1, 2, 5) >>> res = derivative(f, x) >>> res.df # approximation of the derivative array([2.71828183, 3.49034296, 4.48168907, 5.75460268, 7.3890561 ]) >>> res.error # estimate of the error array([7.13740178e-12, 9.16600129e-12, 1.17594823e-11, 1.51061386e-11, 1.94262384e-11]) >>> abs(res.df - df(x)) # true error array([2.53130850e-14, 3.55271368e-14, 5.77315973e-14, 5.59552404e-14, 6.92779167e-14])
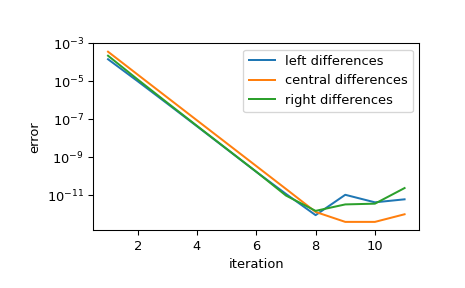
Показать сходимость аппроксимации при уменьшении шага. На каждой итерации шаг уменьшается на step_factor, поэтому для достаточно малого начального шага каждая итерация уменьшает ошибку на коэффициент
1/step_factor**orderпока конечная точность арифметики не препятствует дальнейшему улучшению.>>> import matplotlib.pyplot as plt >>> iter = list(range(1, 12)) # maximum iterations >>> hfac = 2 # step size reduction per iteration >>> hdir = [-1, 0, 1] # compare left-, central-, and right- steps >>> order = 4 # order of differentiation formula >>> x = 1 >>> ref = df(x) >>> errors = [] # true error >>> for i in iter: ... res = derivative(f, x, maxiter=i, step_factor=hfac, ... step_direction=hdir, order=order, ... # prevent early termination ... tolerances=dict(atol=0, rtol=0)) ... errors.append(abs(res.df - ref)) >>> errors = np.array(errors) >>> plt.semilogy(iter, errors[:, 0], label='left differences') >>> plt.semilogy(iter, errors[:, 1], label='central differences') >>> plt.semilogy(iter, errors[:, 2], label='right differences') >>> plt.xlabel('iteration') >>> plt.ylabel('error') >>> plt.legend() >>> plt.show()
>>> (errors[1, 1] / errors[0, 1], 1 / hfac**order) (0.06215223140159822, 0.0625)
Реализация векторизована по x, step_direction, и args. Функция вычисляется один раз перед первой итерацией для проверки входных данных и стандартизации, и один раз за итерацию после этого.
>>> def f(x, p): ... f.nit += 1 ... return x**p >>> f.nit = 0 >>> def df(x, p): ... return p*x**(p-1) >>> x = np.arange(1, 5) >>> p = np.arange(1, 6).reshape((-1, 1)) >>> hdir = np.arange(-1, 2).reshape((-1, 1, 1)) >>> res = derivative(f, x, args=(p,), step_direction=hdir, maxiter=1) >>> np.allclose(res.df, df(x, p)) True >>> res.df.shape (3, 5, 4) >>> f.nit 2
По умолчанию, preserve_shape равно False, и поэтому вызываемый объект f может вызываться с массивами любых совместимых форм. Например:
>>> shapes = [] >>> def f(x, c): ... shape = np.broadcast_shapes(x.shape, c.shape) ... shapes.append(shape) ... return np.sin(c*x) >>> >>> c = [1, 5, 10, 20] >>> res = derivative(f, 0, args=(c,)) >>> shapes [(4,), (4, 8), (4, 2), (3, 2), (2, 2), (1, 2)]
Чтобы понять, откуда берутся эти формы - и лучше понять, как
derivativeвычисляет точные результаты - обратите внимание, что более высокие значенияcсоответствуют синусоидам более высокой частоты. Синусоиды более высокой частоты заставляют производную функции изменяться быстрее, поэтому требуется больше вычислений функции для достижения целевой точности:>>> res.nfev array([11, 13, 15, 17], dtype=int32)
Начальный
shape,(4,), соответствует вычислению функции в одной абсциссе и всех четырёх частотах; это используется для проверки входных данных и определения размера и типа массивов, которые хранят результаты. Следующая форма соответствует вычислению функции на начальной сетке абсцисс и всех четырёх частотах. Последующие вызовы функции вычисляют функцию ещё на двух абсциссах, увеличивая эффективный порядок аппроксимации на два. Однако в последующих вычислениях функции она вычисляется на меньшем количестве частот, потому что соответствующая производная уже сошлась к требуемой точности. Это экономит вычисления функции для улучшения производительности, но требует, чтобы функция принимала аргументы любой формы.«Векторно-значные» функции вряд ли удовлетворяют этому требованию. Например, рассмотрим
>>> def f(x): ... return [x, np.sin(3*x), x+np.sin(10*x), np.sin(20*x)*(x-1)**2]
Этот подынтегральный выражение несовместим с
derivativeкак написано; например, форма вывода не будет такой же, как формаx. Такая функция мог может быть преобразовано в совместимую форму с введением дополнительных параметров, но это было бы неудобно. В таких случаях более простое решение — использовать preserve_shape.>>> shapes = [] >>> def f(x): ... shapes.append(x.shape) ... x0, x1, x2, x3 = x ... return [x0, np.sin(3*x1), x2+np.sin(10*x2), np.sin(20*x3)*(x3-1)**2] >>> >>> x = np.zeros(4) >>> res = derivative(f, x, preserve_shape=True) >>> shapes [(4,), (4, 8), (4, 2), (4, 2), (4, 2), (4, 2)]
Здесь форма
xявляется(4,). Сpreserve_shape=True, функция может быть вызвана с аргументомxформы(4,)или(4, n), и это то, что мы наблюдаем.