Разрешить добавление новых точек инкрементально. Это требует некоторых дополнительных
ресурсов.
qhull_optionsstr, optional
Дополнительные опции для передачи в Qhull. См. руководство Qhull для подробностей. (По умолчанию: "Qx" для ndim > 4 и "" в противном случае) Опция "Qt" всегда включена.
Атрибуты:
точкиndarray типа double, форма (npoints, ndim)
Координаты входных точек.
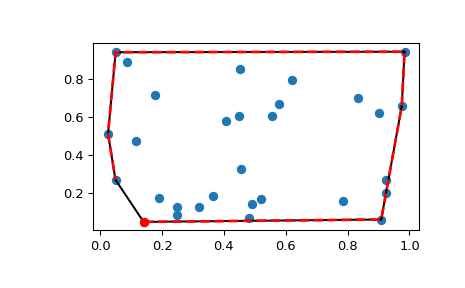
вершиныndarray целых чисел, форма (nvertices,)
Индексы точек, образующих вершины выпуклой оболочки.
Для 2-D выпуклых оболочек вершины расположены против часовой стрелки.
Для других размерностей они расположены в порядке ввода.
симплексыndarray целых чисел, форма (nfacet, ndim)
Индексы соседних граней для каждой грани. k-й сосед противоположен k-й вершине. -1 означает отсутствие соседа.
уравненияndarray типа double, форма (nfacet, ndim+1)
[normal, offset], формирующие уравнение гиперплоскости грани (см. Документация Qhull для получения дополнительной информации).
компланарныйndarray из int, форма (ncoplanar, 3)
Индексы компланарных точек и соответствующие индексы ближайших граней и ближайших вершин. Компланарные точки - это входные точки, которые были не включен в триангуляцию из-за проблем с численной точностью.
Если опция "Qc" не указана, этот список не вычисляется.
хорошоndarray типа bool или None
Одномерный булев массив, указывающий, какие грани являются хорошими. Используется с опциями, вычисляющими хорошие грани, например QGn и QG-n. Хорошие грани определяются как те, которые видны (n) или невидимы (-n) из точки n, где n — n-я точка в 'points'. Атрибут 'good' может использоваться как индекс в 'simplices' для возврата хороших (видимых) граней: simplices[good]. Грань видна только снаружи оболочки, и ни копланарность, ни вырожденность не считаются случаями видимости.
Если опция "QGn" или "QG-n" не указана, возвращается None.
Добавлено в версии 1.3.0.
областьfloat
Площадь поверхности выпуклой оболочки при размерности входных данных > 2.
Когда входные points являются двумерными, это периметр выпуклой оболочки.
Добавлено в версии 0.17.0.
объёмfloat
Объём выпуклой оболочки, когда размерность входных данных > 2. Когда входные points являются двумерными, это площадь выпуклой оболочки.