HalfspaceIntersection#
- класс scipy.spatial.HalfspaceIntersection(полупространства, interior_point, инкрементальных=False, qhull_options=None)#
Пересечения полупространств в N измерениях.
Добавлено в версии 0.19.0.
- Параметры:
- полупространстваndarray чисел с плавающей запятой, форма (nineq, ndim+1)
Сложенные неравенства вида Ax + b <= 0 в формате [A; b]
- interior_pointndarray из float, форма (ndim,)
Точка, явно находящаяся внутри области, определённой полупространствами. Также называется допустимой точкой, её можно получить с помощью линейного программирования.
- инкрементальныхbool, необязательно
Позволяет добавлять новые полупространства инкрементально. Это требует дополнительных ресурсов.
- qhull_optionsstr, optional
Дополнительные опции для передачи в Qhull. См. руководство Qhull для подробностей. (По умолчанию: “Qx” для ndim > 4 и “” в противном случае) Опция “H” всегда включена.
- Атрибуты:
- полупространстваndarray из double, форма (nineq, ndim+1)
Входные полупространства.
- interior_point :ndarray из float, форма (ndim,)
Входная внутренняя точка.
- пересеченияndarray типа double, форма (ninter, ndim)
Пересечения всех полупространств.
- двойные точкиndarray типа double, форма (nineq, ndim)
Двойные точки входных полупространств.
- dual_facetsсписок списков целых чисел
Индексы точек, образующих (не обязательно симплициальные) грани двойной выпуклой оболочки.
- dual_verticesndarray целых чисел, форма (nvertices,)
Индексы полупространств, образующих вершины двойственной выпуклой оболочки. Для 2-D выпуклых оболочек вершины расположены против часовой стрелки. Для других размерностей они расположены в порядке ввода.
- dual_equationsndarray типа double, форма (nfacet, ndim+1)
[normal, offset] формируют уравнение гиперплоскости двойственной грани (см. Документация Qhull для получения дополнительной информации).
- dual_areafloat
Площадь двойной выпуклой оболочки
- dual_volumefloat
Объем двойного выпуклого многогранника
Методы
add_halfspaces(halfspaces[, restart])Обработать набор дополнительных новых полупространств.
close()Завершить инкрементную обработку.
- Вызывает:
- QhullError
Возникает, когда Qhull сталкивается с ошибкой, например, геометрической вырожденностью, когда опции для разрешения не включены.
- ValueError
Возникает, если на вход подается несовместимый массив.
Примечания
Пересечения вычисляются с использованием Библиотека Qhull. Это воспроизводит функциональность «qhalf» Qhull.
Ссылки
[Qhull][1]S. Boyd, L. Vandenberghe, Convex Optimization, доступно на http://stanford.edu/~boyd/cvxbook/
Примеры
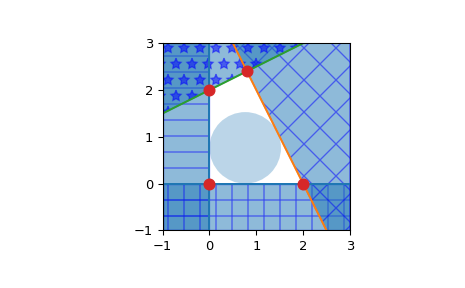
Пересечение полупространств плоскостей, образующих некоторый многоугольник
>>> from scipy.spatial import HalfspaceIntersection >>> import numpy as np >>> halfspaces = np.array([[-1, 0., 0.], ... [0., -1., 0.], ... [2., 1., -4.], ... [-0.5, 1., -2.]]) >>> feasible_point = np.array([0.5, 0.5]) >>> hs = HalfspaceIntersection(halfspaces, feasible_point)
Построить полупространства как заполненные области и точки пересечения:
>>> import matplotlib.pyplot as plt >>> fig = plt.figure() >>> ax = fig.add_subplot(1, 1, 1, aspect='equal') >>> xlim, ylim = (-1, 3), (-1, 3) >>> ax.set_xlim(xlim) >>> ax.set_ylim(ylim) >>> x = np.linspace(-1, 3, 100) >>> symbols = ['-', '+', 'x', '*'] >>> signs = [0, 0, -1, -1] >>> fmt = {"color": None, "edgecolor": "b", "alpha": 0.5} >>> for h, sym, sign in zip(halfspaces, symbols, signs): ... hlist = h.tolist() ... fmt["hatch"] = sym ... if h[1]== 0: ... ax.axvline(-h[2]/h[0], label='{}x+{}y+{}=0'.format(*hlist)) ... xi = np.linspace(xlim[sign], -h[2]/h[0], 100) ... ax.fill_between(xi, ylim[0], ylim[1], **fmt) ... else: ... ax.plot(x, (-h[2]-h[0]*x)/h[1], label='{}x+{}y+{}=0'.format(*hlist)) ... ax.fill_between(x, (-h[2]-h[0]*x)/h[1], ylim[sign], **fmt) >>> x, y = zip(*hs.intersections) >>> ax.plot(x, y, 'o', markersize=8)
По умолчанию qhull не предоставляет способ вычисления внутренней точки. Это можно легко вычислить с помощью линейного программирования. Рассматривая полупространства вида \(Ax + b \leq 0\), решая линейную программу:
\[ \begin{align}\begin{aligned}max \: y\\s.t. Ax + y ||A_i|| \leq -b\end{aligned}\end{align} \]С \(A_i\) являются строками A, т.е. нормалями к каждой плоскости.
Даст точку x, которая наиболее глубоко внутри выпуклого многогранника. Если быть точным, это центр наибольшей гиперсферы радиуса y, вписанной в многогранник. Эта точка называется центром Чебышёва многогранника (см. [1] 4.3.1, стр.148-149). Уравнения, выводимые Qhull, всегда нормализованы.
>>> from scipy.optimize import linprog >>> from matplotlib.patches import Circle >>> norm_vector = np.reshape(np.linalg.norm(halfspaces[:, :-1], axis=1), ... (halfspaces.shape[0], 1)) >>> c = np.zeros((halfspaces.shape[1],)) >>> c[-1] = -1 >>> A = np.hstack((halfspaces[:, :-1], norm_vector)) >>> b = - halfspaces[:, -1:] >>> res = linprog(c, A_ub=A, b_ub=b, bounds=(None, None)) >>> x = res.x[:-1] >>> y = res.x[-1] >>> circle = Circle(x, radius=y, alpha=0.3) >>> ax.add_patch(circle) >>> plt.legend(bbox_to_anchor=(1.6, 1.0)) >>> plt.show()