cont2discrete#
- scipy.signal.cont2discrete(система, dt, метод='zoh', alpha=None)[источник]#
Преобразование непрерывной системы в дискретную систему пространства состояний.
- Параметры:
- системакортеж, описывающий систему, или экземпляр
lti Следующее дает количество элементов в кортеже и их интерпретацию:
1: (экземпляр
lti)2: (num, den)
3: (нули, полюсы, коэффициент усиления)
4: (A, B, C, D)
- dtfloat
Шаг дискретизации по времени.
- методstr, optional
Какой метод использовать:
gbt: обобщённое билинейное преобразование
билинейный: аппроксимация Тастина ("gbt" с alpha=0.5)
euler: метод Эйлера (или прямых разностей) (“gbt” с alpha=0)
backward_diff: Обратное дифференцирование (“gbt” с alpha=1.0)
zoh: нулевого порядка (по умолчанию)
foh: удержание первого порядка (versionadded: 1.3.0)
impulse: эквивалентная импульсная характеристика (versionadded: 1.3.0)
- alphafloat в пределах [0, 1], опционально
Параметр веса обобщённого билинейного преобразования, который должен указываться только с method="gbt" и игнорируется в противном случае
- системакортеж, описывающий систему, или экземпляр
- Возвращает:
- sysdкортеж, содержащий дискретную систему
В зависимости от типа ввода, вывод будет иметь форму
(num, den, dt) для ввода передаточной функции
(нули, полюса, коэффициент усиления, dt) для ввода нулей-полюсов-усиления
(A, B, C, D, dt) для ввода системы в пространстве состояний
Примечания
По умолчанию процедура использует метод Zero-Order Hold (zoh) для выполнения преобразования. Альтернативно может использоваться обобщённое билинейное преобразование, которое включает распространённую билинейную аппроксимацию Тастина, метод Эйлера или метод обратных разностей.
Метод Zero-Order Hold (zoh) основан на [1], обобщённое билинейное приближение основано на [2] и [3], метод First-Order Hold (foh) основан на [4].
Ссылки
[3]G. Zhang, X. Chen, и T. Chen, Цифровое перепроектирование с помощью обобщенного билинейного преобразования, Int. J. Control, т. 82, № 4, стр. 741-754, 2009. (https://www.mypolyuweb.hk/~magzhang/Research/ZCC09_IJC.pdf)
[4]G. F. Franklin, J. D. Powell, и M. L. Workman, Digital control of dynamic systems, 3rd ed. Menlo Park, Calif: Addison-Wesley, pp. 204-206, 1998.
Примеры
Мы можем преобразовать непрерывную систему в пространстве состояний в дискретную:
>>> import numpy as np >>> import matplotlib.pyplot as plt >>> from scipy.signal import cont2discrete, lti, dlti, dstep
Определите непрерывную систему в пространстве состояний.
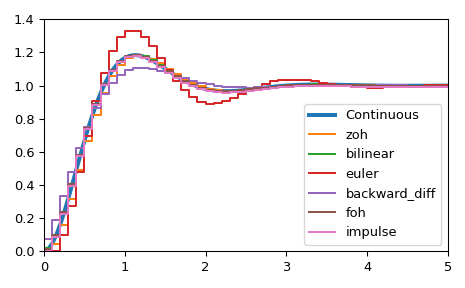
>>> A = np.array([[0, 1],[-10., -3]]) >>> B = np.array([[0],[10.]]) >>> C = np.array([[1., 0]]) >>> D = np.array([[0.]]) >>> l_system = lti(A, B, C, D) >>> t, x = l_system.step(T=np.linspace(0, 5, 100)) >>> fig, ax = plt.subplots() >>> ax.plot(t, x, label='Continuous', linewidth=3)
Преобразуйте его в дискретную систему пространства состояний несколькими методами.
>>> dt = 0.1 >>> for method in ['zoh', 'bilinear', 'euler', 'backward_diff', 'foh', 'impulse']: ... d_system = cont2discrete((A, B, C, D), dt, method=method) ... s, x_d = dstep(d_system) ... ax.step(s, np.squeeze(x_d), label=method, where='post') >>> ax.axis([t[0], t[-1], x[0], 1.4]) >>> ax.legend(loc='best') >>> fig.tight_layout() >>> plt.show()