lsim#
- scipy.signal.lsim(система, U, T, X0=None, interp=True)[источник]#
Моделирование выхода непрерывной линейной системы.
- Параметры:
- системаэкземпляр класса LTI или кортеж, описывающий систему.
Следующее дает количество элементов в кортеже и их интерпретацию:
1: (экземпляр
lti)2: (num, den)
3: (нули, полюсы, коэффициент усиления)
4: (A, B, C, D)
- Uarray_like
Входной массив, описывающий вход на каждом временном шаге T (предполагается интерполяция между заданными временами). Если есть несколько входов, то каждый столбец массива ранга 2 представляет вход. Если U = 0 или None, используется нулевой вход.
- Tarray_like
Временные шаги, на которых определён вход и на которых требуется выход. Должны быть неотрицательными, возрастающими и равноотстоящими.
- X0array_like, необязательный
Начальные условия для вектора состояния (по умолчанию нулевые).
- interpbool, необязательно
Использовать линейную (True, по умолчанию) или интерполяцию нулевого порядка (False) для входного массива.
- Возвращает:
- T1D ndarray
Временные значения для вывода.
- yout1D ndarray
Отклик системы.
- xoutndarray
Эволюция вектора состояния во времени.
Примечания
Если (num, den) передано для
system, коэффициенты как для числителя, так и для знаменателя должны быть указаны в порядке убывания степени (например,s^2 + 3s + 5будет представлен как[1, 3, 5]).Примеры
Мы будем использовать
lsimдля моделирования аналогового фильтра Бесселя, примененного к сигналу.>>> import numpy as np >>> from scipy.signal import bessel, lsim >>> import matplotlib.pyplot as plt
Создайте фильтр Бесселя нижних частот с частотой среза 12 Гц.
>>> b, a = bessel(N=5, Wn=2*np.pi*12, btype='lowpass', analog=True)
Сгенерировать данные, к которым применяется фильтр.
>>> t = np.linspace(0, 1.25, 500, endpoint=False)
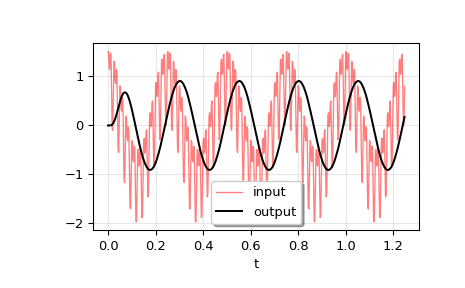
Входной сигнал - сумма трех синусоидальных кривых с частотами 4 Гц, 40 Гц и 80 Гц. Фильтр должен в основном устранять компоненты 40 Гц и 80 Гц, оставляя только сигнал 4 Гц.
>>> u = (np.cos(2*np.pi*4*t) + 0.6*np.sin(2*np.pi*40*t) + ... 0.5*np.cos(2*np.pi*80*t))
Смоделировать фильтр с
lsim.>>> tout, yout, xout = lsim((b, a), U=u, T=t)
Построить результат.
>>> plt.plot(t, u, 'r', alpha=0.5, linewidth=1, label='input') >>> plt.plot(tout, yout, 'k', linewidth=1.5, label='output') >>> plt.legend(loc='best', shadow=True, framealpha=1) >>> plt.grid(alpha=0.3) >>> plt.xlabel('t') >>> plt.show()
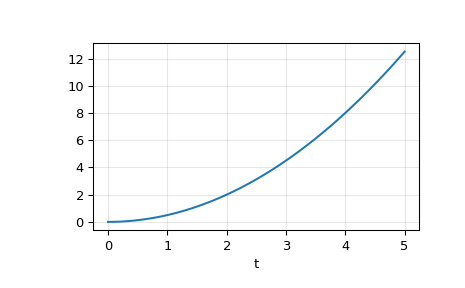
Во втором примере мы моделируем двойной интегратор
y'' = u, с постоянным входомu = 1. Мы будем использовать представление пространства состояний интегратора.>>> from scipy.signal import lti >>> A = np.array([[0.0, 1.0], [0.0, 0.0]]) >>> B = np.array([[0.0], [1.0]]) >>> C = np.array([[1.0, 0.0]]) >>> D = 0.0 >>> system = lti(A, B, C, D)
t и u определить время и входной сигнал для моделируемой системы.
>>> t = np.linspace(0, 5, num=50) >>> u = np.ones_like(t)
Выполнить моделирование, а затем построить график y. Как и ожидалось, график показывает кривую
y = 0.5*t**2.>>> tout, y, x = lsim(system, u, t) >>> plt.plot(t, y) >>> plt.grid(alpha=0.3) >>> plt.xlabel('t') >>> plt.show()