RigidTransform#
- класс scipy.spatial.transform.RigidTransform#
Жесткое преобразование в 3-х измерениях.
Этот класс предоставляет интерфейс для инициализации и представления жёстких преобразований (вращение и перенос) в 3D-пространстве. В разных областях этот тип преобразования может называться «pose” (особенно в робототехнике), “внешние параметры”, или “матрица модели” (особенно в компьютерной графике), но основная концепция та же: вращение и перемещение, описывающие ориентацию одной 3D системы координат относительно другой. Математически эти преобразования принадлежат специальной евклидовой группе SE(3), которая кодирует вращение (SO(3)) плюс перемещение.
Поддерживаются следующие операции над жёсткими преобразованиями:
Применение к векторам
Композиция преобразований
Инверсия преобразования
Индексация преобразования
Обратите внимание, что системы координат должны быть правыми. Из-за этого этот класс более точно представляет правильный жесткие преобразования в SE(3) вместо жестких преобразований в E(3) в более общем случае [1].
Индексирование внутри преобразования поддерживается, так как несколько преобразований могут быть сохранены в одном
RigidTransformэкземпляр.Чтобы создать
RigidTransformобъекты используютfrom_...методы (см. примеры ниже).RigidTransform(...)не предназначен для непосредственного создания экземпляра.Для строгих введений в жесткие преобразования, см. [2], [3], и [4].
- Атрибуты:
singleПредставляет ли этот экземпляр одно преобразование.
rotationВернуть компонент вращения преобразования.
translationВозвращает компонент трансляции преобразования.
Методы
__len__(self)Возвращает количество преобразований в этом объекте.
__getitem__(self, indexer)Извлечь преобразование(я) по заданным индексам из этого объекта.
__mul__(self, RigidTransform other)Скомбинировать это преобразование с другим.
__pow__(self, float n)Композиция этого преобразования с самим собой n раз.
from_matrix(cls, matrix)Инициализировать из матрицы преобразования 4x4.
from_rotation(cls, rotation)Инициализировать из вращения, без перемещения.
from_translation(cls, translation)Инициализация из массива numpy сдвига, без вращения.
from_components(cls, translation, rotation)Инициализация жесткого преобразования из компонентов трансляции и вращения.
from_exp_coords(cls, exp_coords)Инициализация из экспоненциальных координат преобразования.
from_dual_quat(cls, dual_quat, *[, scalar_first])Инициализация из единичного двойного кватерниона.
as_matrix(self)Вернуть копию матричного представления преобразования.
as_components(self)Возвращает компоненты трансляции и вращения преобразования, где вращение применяется первым, за которым следует трансляция.
as_exp_coords(self)Возвращает экспоненциальные координаты преобразования.
as_dual_quat(self, *[, scalar_first])Возвращает представление преобразования в виде двойного кватерниона.
concatenate(cls, transforms)Объединить последовательность
RigidTransformобъектов в единый объект.apply(self, vector[, inverse])Применить преобразование к вектору.
inv(self)Инвертировать это преобразование.
identity(cls[, num])Инициализировать тождественное преобразование.
Примечания
Добавлено в версии 1.16.0.
Ссылки
[3][4]Kevin M. Lynch и Frank C. Park, "Modern Robotics: Mechanics, Planning, and Control" Глава 3.3, 2017, Cambridge University Press. https://hades.mech.northwestern.edu/images/2/25/MR-v2.pdf#page=107.31
[5]Пол Фергейл, «Представление позы робота: хорошее, плохое и ужасное», 9 июня 2014 г. https://rpg.ifi.uzh.ch/docs/teaching/2024/FurgaleTutorial.pdf
Примеры
A
RigidTransformэкземпляр может быть инициализирован в любом из вышеуказанных форматов и преобразован в любой другой. Базовый объект не зависит от представления, используемого для инициализации.Соглашения об обозначениях и композиция
Обозначения здесь в основном следуют соглашению, определённому в [5]. Когда мы называем преобразования, мы читаем индексы справа налево. Таким образом,
tf_A_Bпредставляет преобразование A <- B и может интерпретироваться как:координатах и ориентации B относительно A
преобразование точек из B в A
положение B, описанное в системе координат A
tf_A_B ^ ^ | | | --- from B | ----- to A
При композиции преобразований важен порядок. Преобразования не коммутативны, поэтому в общем случае
tf_A_B * tf_B_Cне то же самое, чтоtf_B_C * tf_A_B. Преобразования компонуются и применяются к векторам справа налево. Таким образом,(tf_A_B * tf_B_C).apply(p_C)то же самое, чтоtf_A_B.apply(tf_B_C.apply(p_C)).При композиции преобразования должны быть упорядочены так, чтобы оператор умножения был окружён одним кадром, чтобы кадр «сокращался» и оставались внешние кадры. В примере ниже B сокращается, и остаются внешние кадры A и C. Или, другими словами, A <- C — это то же самое, что A <- B <- C.
----------- B cancels out | | v v tf_A_C = tf_A_B * tf_B_C ^ ^ | | ------------ to A, from C are left
При обозначении векторов мы пишем индекс системы отсчёта, в которой определён вектор. Таким образом,
p_Bозначает точкуpопределённый в системе координат B. Чтобы преобразовать эту точку из системы координат B в координаты системы A, мы применяем преобразованиеtf_A_Bк вектору, выравнивая элементы так, чтобы обозначенные B-кадры находились рядом и "сокращались".------------ B cancels out | | v v p_A = tf_A_B.apply(p_B) ^ | -------------- A is left
Визуализация
>>> from scipy.spatial.transform import RigidTransform as Tf >>> from scipy.spatial.transform import Rotation as R >>> import numpy as np
Следующая функция может использоваться для построения преобразований с помощью Matplotlib, показывая, как они преобразуют стандартные оси координат x, y, z:
>>> import matplotlib.pyplot as plt >>> colors = ("#FF6666", "#005533", "#1199EE") # Colorblind-safe RGB >>> def plot_transformed_axes(ax, tf, name=None, scale=1): ... r = tf.rotation ... t = tf.translation ... loc = np.array([t, t]) ... for i, (axis, c) in enumerate(zip((ax.xaxis, ax.yaxis, ax.zaxis), ... colors)): ... axlabel = axis.axis_name ... axis.set_label_text(axlabel) ... axis.label.set_color(c) ... axis.line.set_color(c) ... axis.set_tick_params(colors=c) ... line = np.zeros((2, 3)) ... line[1, i] = scale ... line_rot = r.apply(line) ... line_plot = line_rot + loc ... ax.plot(line_plot[:, 0], line_plot[:, 1], line_plot[:, 2], c) ... text_loc = line[1]*1.2 ... text_loc_rot = r.apply(text_loc) ... text_plot = text_loc_rot + t ... ax.text(*text_plot, axlabel.upper(), color=c, ... va="center", ha="center") ... ax.text(*tf.translation, name, color="k", va="center", ha="center", ... bbox={"fc": "w", "alpha": 0.8, "boxstyle": "circle"})
Определение систем координат
Давайте рассмотрим пример.
Сначала определите "мировую систему координат" A, также называемую "базовой системой координат". Все системы координат являются тождественным преобразованием с их собственной точки зрения.
>>> tf_A = Tf.identity()
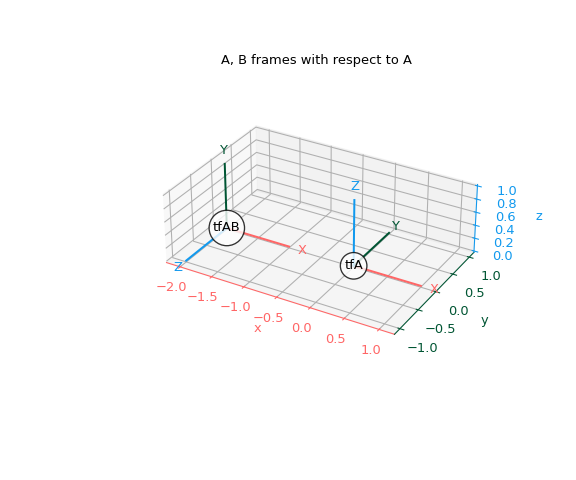
Мы визуализируем новый кадр B в системе координат A. Поэтому нам нужно определить преобразование, которое преобразует координаты из кадра B в кадр A (A <- B).
Физически представим построение B из A следующим образом:
Поворот A на +90 градусов вокруг своей оси x.
Перемещение повёрнутой системы координат на 2 единицы в направлении -x системы A.
С точки зрения A, B находится в точке [-2, 0, 0] и повёрнут на +90 градусов вокруг оси x, что в точности соответствует преобразованию A <- B.
>>> t_A_B = np.array([-2, 0, 0]) >>> r_A_B = R.from_euler('xyz', [90, 0, 0], degrees=True) >>> tf_A_B = Tf.from_components(t_A_B, r_A_B)
Давайте построим эти кадры.
>>> fig, ax = plt.subplots(subplot_kw={"projection": "3d"}) >>> plot_transformed_axes(ax, tf_A, name="tfA") # A plotted in A >>> plot_transformed_axes(ax, tf_A_B, name="tfAB") # B plotted in A >>> ax.set_title("A, B frames with respect to A") >>> ax.set_aspect("equal") >>> ax.figure.set_size_inches(6, 5) >>> plt.show()
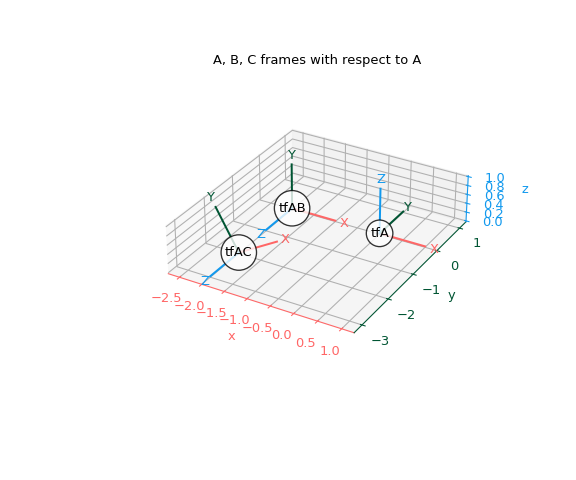
Теперь визуализируем новый фрейм C в системе координат B. Представим, что C строится из B путем:
Перемещение B на 2 единицы в направлении +z.
Поворот B на +30 градусов вокруг его оси z.
>>> t_B_C = np.array([0, 0, 2]) >>> r_B_C = R.from_euler('xyz', [0, 0, 30], degrees=True) >>> tf_B_C = Tf.from_components(t_B_C, r_B_C)
Чтобы построить эти кадры с единой точки зрения, нам нужно вычислить преобразование между A и C. Обратите внимание, что мы не делаем это преобразование напрямую, а вместо этого составляем промежуточные преобразования, которые позволяют нам перейти от C к A:
>>> tf_A_C = tf_A_B * tf_B_C # A <- B <- C
Теперь мы можем построить эти три кадра с точки зрения A.
>>> fig, ax = plt.subplots(subplot_kw={"projection": "3d"}) >>> plot_transformed_axes(ax, tf_A, name="tfA") # A plotted in A >>> plot_transformed_axes(ax, tf_A_B, name="tfAB") # B plotted in A >>> plot_transformed_axes(ax, tf_A_C, name="tfAC") # C plotted in A >>> ax.set_title("A, B, C frames with respect to A") >>> ax.set_aspect("equal") >>> ax.figure.set_size_inches(6, 5) >>> plt.show()
Преобразование векторов
Давайте преобразуем вектор из A в B и C. Для этого сначала инвертируем преобразования, которые у нас уже есть из B и C в A.
>>> tf_B_A = tf_A_B.inv() # B <- A >>> tf_C_A = tf_A_C.inv() # C <- A
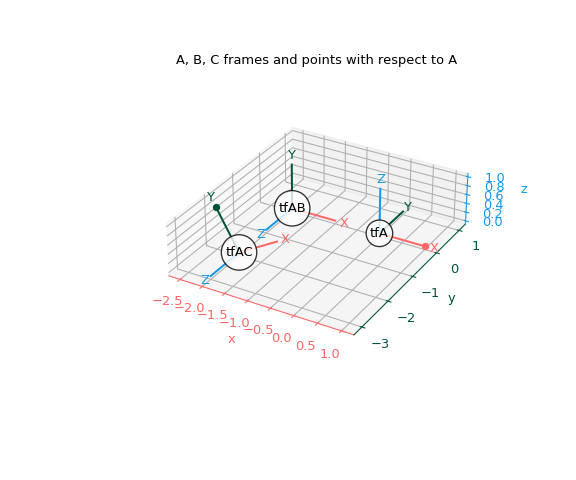
Теперь мы можем определить точку в A и использовать приведенные выше преобразования для получения её координат в B и C:
>>> p1_A = np.array([1, 0, 0]) # +1 in x_A direction >>> p1_B = tf_B_A.apply(p1_A) >>> p1_C = tf_C_A.apply(p1_A) >>> print(p1_A) # Original point 1 in A [1 0 0] >>> print(p1_B) # Point 1 in B [3. 0. 0.] >>> print(p1_C) # Point 1 in C [ 2.59807621 -1.5 -2. ]
Мы также можем сделать обратное. Определяем точку в C и преобразуем её в A:
>>> p2_C = np.array([0, 1, 0]) # +1 in y_C direction >>> p2_A = tf_A_C.apply(p2_C) >>> print(p2_C) # Original point 2 in C [0 1 0] >>> print(p2_A) # Point 2 in A [-2.5 -2. 0.8660254]
Постройте кадры относительно A снова, но также постройте эти две точки:
>>> fig, ax = plt.subplots(subplot_kw={"projection": "3d"}) >>> plot_transformed_axes(ax, tf_A, name="tfA") # A plotted in A >>> plot_transformed_axes(ax, tf_A_B, name="tfAB") # B plotted in A >>> plot_transformed_axes(ax, tf_A_C, name="tfAC") # C plotted in A >>> ax.scatter(p1_A[0], p1_A[1], p1_A[2], color=colors[0]) # +1 x_A >>> ax.scatter(p2_A[0], p2_A[1], p2_A[2], color=colors[1]) # +1 y_C >>> ax.set_title("A, B, C frames and points with respect to A") >>> ax.set_aspect("equal") >>> ax.figure.set_size_inches(6, 5) >>> plt.show()
Переключение базовых систем отсчёта
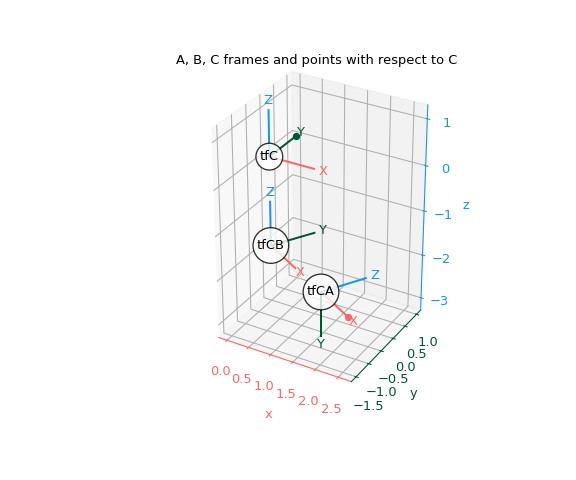
До этого момента мы визуализировали кадры с точки зрения A. Давайте используем определенные преобразования для визуализации кадров с точки зрения C.
Теперь C — это «базовая система координат» или «мировая система координат». Все системы координат являются тождественным преобразованием с их собственной точки зрения.
>>> tf_C = Tf.identity()
Мы уже определили преобразование C <- A и можем получить C <- B, инвертируя существующее преобразование B <- C.
>>> tf_C_B = tf_B_C.inv() # C <- B
Это позволяет нам построить всё с точки зрения C:
>>> fig, ax = plt.subplots(subplot_kw={"projection": "3d"}) >>> plot_transformed_axes(ax, tf_C, name="tfC") # C plotted in C >>> plot_transformed_axes(ax, tf_C_B, name="tfCB") # B plotted in C >>> plot_transformed_axes(ax, tf_C_A, name="tfCA") # A plotted in C >>> ax.scatter(p1_C[0], p1_C[1], p1_C[2], color=colors[0]) >>> ax.scatter(p2_C[0], p2_C[1], p2_C[2], color=colors[1]) >>> ax.set_title("A, B, C frames and points with respect to C") >>> ax.set_aspect("equal") >>> ax.figure.set_size_inches(6, 5) >>> plt.show()