scipy.stats.logser#
-
scipy.stats.logser =
Логарифмическая (логарифмически-рядовая, рядовая) дискретная случайная величина.
Как экземпляр
rv_discreteкласс,logserобъект наследует от него коллекцию общих методов (см. ниже полный список), и дополняет их деталями, специфичными для этого конкретного распределения.Методы
rvs(p, loc=0, size=1, random_state=None)
Случайные величины.
pmf(k, p, loc=0)
Функция вероятности массы.
logpmf(k, p, loc=0)
Логарифм функции вероятности.
cdf(k, p, loc=0)
Интегральная функция распределения.
logcdf(k, p, loc=0)
Логарифм функции кумулятивного распределения.
sf(k, p, loc=0)
Функция выживания (также определяется как
1 - cdf, но sf иногда более точный).logsf(k, p, loc=0)
Логарифм функции выживания.
ppf(q, p, loc=0)
Процентная точка функции (обратная
cdf— процентили).isf(q, p, loc=0)
Обратная функция выживания (обратная к
sf).stats(p, loc=0, moments=’mv’)
Среднее ('m'), дисперсия ('v'), асимметрия ('s') и/или эксцесс ('k').
entropy(p, loc=0)
(Дифференциальная) энтропия случайной величины.
expect(func, args=(p,), loc=0, lb=None, ub=None, conditional=False)
Ожидаемое значение функции (одного аргумента) относительно распределения.
median(p, loc=0)
Медиана распределения.
mean(p, loc=0)
Среднее распределения.
var(p, loc=0)
Дисперсия распределения.
std(p, loc=0)
Стандартное отклонение распределения.
interval(confidence, p, loc=0)
Доверительный интервал с равными площадями вокруг медианы.
Примечания
Функция вероятности массы для
logserравен:\[f(k) = - \frac{p^k}{k \log(1-p)}\]для \(k \ge 1\), \(0 < p < 1\)
logserпринимает \(p\) в качестве параметра формы, где \(p\) является вероятностью единичного успеха и \(1-p\) это вероятность единичного отказа.Функция вероятности массы выше определена в «стандартизированной» форме. Для сдвига распределения используйте
locпараметра. В частности,logser.pmf(k, p, loc)тождественно эквивалентноlogser.pmf(k - loc, p).Примеры
>>> import numpy as np >>> from scipy.stats import logser >>> import matplotlib.pyplot as plt >>> fig, ax = plt.subplots(1, 1)
Получить поддержку:
>>> p = 0.6 >>> lb, ub = logser.support(p)
Вычислить первые четыре момента:
>>> mean, var, skew, kurt = logser.stats(p, moments='mvsk')
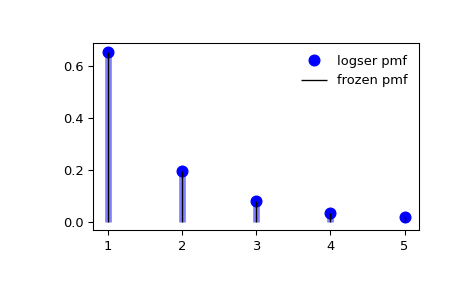
Отображение функции вероятности массы (
pmf):>>> x = np.arange(logser.ppf(0.01, p), ... logser.ppf(0.99, p)) >>> ax.plot(x, logser.pmf(x, p), 'bo', ms=8, label='logser pmf') >>> ax.vlines(x, 0, logser.pmf(x, p), colors='b', lw=5, alpha=0.5)
Альтернативно, объект распределения может быть вызван (как функция) для фиксации формы и положения. Это возвращает «замороженный» объект RV, содержащий заданные фиксированные параметры.
Зафиксировать распределение и отобразить зафиксированное
pmf:>>> rv = logser(p) >>> ax.vlines(x, 0, rv.pmf(x), colors='k', linestyles='-', lw=1, ... label='frozen pmf') >>> ax.legend(loc='best', frameon=False) >>> plt.show()
Проверить точность
cdfиppf:>>> prob = logser.cdf(x, p) >>> np.allclose(x, logser.ppf(prob, p)) True
Генерировать случайные числа:
>>> r = logser.rvs(p, size=1000)