Примечание
Перейти в конец чтобы скачать полный пример кода или запустить этот пример в браузере через JupyterLite или Binder.
Робастная vs эмпирическая оценка ковариации#
Обычная оценка максимального правдоподобия для ковариации очень чувствительна к наличию выбросов в наборе данных. В таком случае лучше использовать робастную оценку ковариации, чтобы гарантировать, что оценка устойчива к "ошибочным" наблюдениям в наборе данных. [1], [2]
Оценщик минимального определителя ковариации#
Оценщик Minimum Covariance Determinant является робастным с высокой точкой разрушения (т.е. его можно использовать для оценки ковариационной матрицы сильно загрязнённых наборов данных, вплоть до \(\frac{n_\text{samples} - n_\text{features}-1}{2}\) выбросов) оценщика ковариации. Идея состоит в том, чтобы найти \(\frac{n_\text{samples} + n_\text{features}+1}{2}\) наблюдения, эмпирическая ковариация которых имеет наименьший определитель, давая «чистое» подмножество наблюдений для вычисления стандартных оценок местоположения и ковариации. После шага коррекции, направленного на компенсацию того факта, что оценки были получены только из части исходных данных, мы получаем устойчивые оценки местоположения и ковариации набора данных.
Оценщик Minimum Covariance Determinant (MCD) был представлен P.J.Rousseuw в [3].
Оценка#
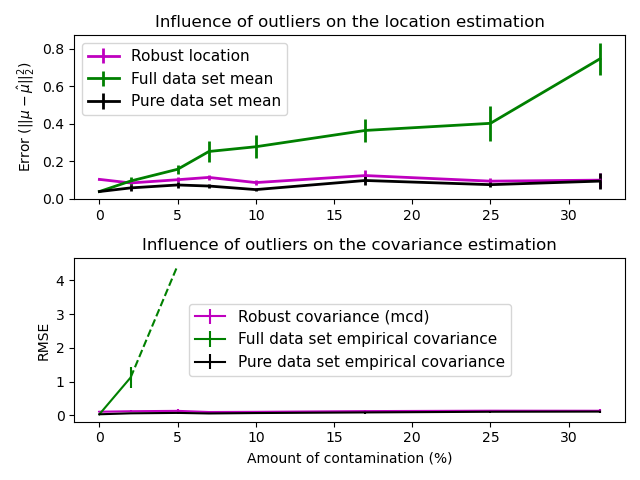
В этом примере мы сравниваем ошибки оценки, которые возникают при использовании различных типов оценок местоположения и ковариации на зашумленных наборах данных с гауссовским распределением:
Среднее значение и эмпирическая ковариация полного набора данных, которые нарушаются, как только в наборе данных появляются выбросы
Устойчивый MCD, который имеет низкую ошибку при условии \(n_\text{samples} > 5n_\text{features}\)
Среднее значение и эмпирическая ковариация наблюдений, которые известны как хорошие. Это можно рассматривать как «идеальную» оценку MCD, поэтому можно доверять нашей реализации, сравнивая с этим случаем.
Ссылки#
# Authors: The scikit-learn developers
# SPDX-License-Identifier: BSD-3-Clause
import matplotlib.font_manager
import matplotlib.pyplot as plt
import numpy as np
from sklearn.covariance import EmpiricalCovariance, MinCovDet
# example settings
n_samples = 80
n_features = 5
repeat = 10
range_n_outliers = np.concatenate(
(
np.linspace(0, n_samples / 8, 5),
np.linspace(n_samples / 8, n_samples / 2, 5)[1:-1],
)
).astype(int)
# definition of arrays to store results
err_loc_mcd = np.zeros((range_n_outliers.size, repeat))
err_cov_mcd = np.zeros((range_n_outliers.size, repeat))
err_loc_emp_full = np.zeros((range_n_outliers.size, repeat))
err_cov_emp_full = np.zeros((range_n_outliers.size, repeat))
err_loc_emp_pure = np.zeros((range_n_outliers.size, repeat))
err_cov_emp_pure = np.zeros((range_n_outliers.size, repeat))
# computation
for i, n_outliers in enumerate(range_n_outliers):
for j in range(repeat):
rng = np.random.RandomState(i * j)
# generate data
X = rng.randn(n_samples, n_features)
# add some outliers
outliers_index = rng.permutation(n_samples)[:n_outliers]
outliers_offset = 10.0 * (
np.random.randint(2, size=(n_outliers, n_features)) - 0.5
)
X[outliers_index] += outliers_offset
inliers_mask = np.ones(n_samples).astype(bool)
inliers_mask[outliers_index] = False
# fit a Minimum Covariance Determinant (MCD) robust estimator to data
mcd = MinCovDet().fit(X)
# compare raw robust estimates with the true location and covariance
err_loc_mcd[i, j] = np.sum(mcd.location_**2)
err_cov_mcd[i, j] = mcd.error_norm(np.eye(n_features))
# compare estimators learned from the full data set with true
# parameters
err_loc_emp_full[i, j] = np.sum(X.mean(0) ** 2)
err_cov_emp_full[i, j] = (
EmpiricalCovariance().fit(X).error_norm(np.eye(n_features))
)
# compare with an empirical covariance learned from a pure data set
# (i.e. "perfect" mcd)
pure_X = X[inliers_mask]
pure_location = pure_X.mean(0)
pure_emp_cov = EmpiricalCovariance().fit(pure_X)
err_loc_emp_pure[i, j] = np.sum(pure_location**2)
err_cov_emp_pure[i, j] = pure_emp_cov.error_norm(np.eye(n_features))
# Display results
font_prop = matplotlib.font_manager.FontProperties(size=11)
plt.subplot(2, 1, 1)
lw = 2
plt.errorbar(
range_n_outliers,
err_loc_mcd.mean(1),
yerr=err_loc_mcd.std(1) / np.sqrt(repeat),
label="Robust location",
lw=lw,
color="m",
)
plt.errorbar(
range_n_outliers,
err_loc_emp_full.mean(1),
yerr=err_loc_emp_full.std(1) / np.sqrt(repeat),
label="Full data set mean",
lw=lw,
color="green",
)
plt.errorbar(
range_n_outliers,
err_loc_emp_pure.mean(1),
yerr=err_loc_emp_pure.std(1) / np.sqrt(repeat),
label="Pure data set mean",
lw=lw,
color="black",
)
plt.title("Influence of outliers on the location estimation")
plt.ylabel(r"Error ($||\mu - \hat{\mu}||_2^2$)")
plt.legend(loc="upper left", prop=font_prop)
plt.subplot(2, 1, 2)
x_size = range_n_outliers.size
plt.errorbar(
range_n_outliers,
err_cov_mcd.mean(1),
yerr=err_cov_mcd.std(1),
label="Robust covariance (mcd)",
color="m",
)
plt.errorbar(
range_n_outliers[: (x_size // 5 + 1)],
err_cov_emp_full.mean(1)[: (x_size // 5 + 1)],
yerr=err_cov_emp_full.std(1)[: (x_size // 5 + 1)],
label="Full data set empirical covariance",
color="green",
)
plt.plot(
range_n_outliers[(x_size // 5) : (x_size // 2 - 1)],
err_cov_emp_full.mean(1)[(x_size // 5) : (x_size // 2 - 1)],
color="green",
ls="--",
)
plt.errorbar(
range_n_outliers,
err_cov_emp_pure.mean(1),
yerr=err_cov_emp_pure.std(1),
label="Pure data set empirical covariance",
color="black",
)
plt.title("Influence of outliers on the covariance estimation")
plt.xlabel("Amount of contamination (%)")
plt.ylabel("RMSE")
plt.legend(loc="center", prop=font_prop)
plt.tight_layout()
plt.show()
Общее время выполнения скрипта: (0 минут 2.731 секунды)
Связанные примеры
Робастная оценка ковариации и релевантность расстояний Махаланобиса

Линейный и квадратичный дискриминантный анализ с эллипсоидом ковариации